Menu
Menu
Menu
C11 VISUAL ARTS
C11 VISUAL ARTS
C11 VISUAL ARTS
4D Entropy : An Experimental Camera
Framework for Physical Perception of Multidimensional Information Systems
Framework for Physical Perception of Multidimensional Information Systems
Framework for Physical Perception of Multidimensional Information Systems
TABLE OF CONTENTS
Executive Summary
Project Overview
Research Context & Motivation
Technical Innovation
System Implementation
Research Vision
TABLE OF CONTENTS
Executive Summary
Project Overview
Research Context & Motivation
Technical Innovation
System Implementation
Research Vision
TABLE OF CONTENTS
Executive Summary
Project Overview
Research Context & Motivation
Technical Innovation
System Implementation
Research Vision
EXECUTIVE SUMMARY
Project Vision
The 4D Entropy Pin Camera investigates how tactile pin arrays combined can create tangible representations of 4D space, entropy decay, and related mathematical concepts through embodied interaction.
Key Innovation
Instead of traditional visual scientific visualization, this system creates tactile interfaces where mathematical abstractions—entropy fields and 4D stereographic projections—are encoded through dynamic physical pin movements and retrieved through direct haptic exploration. This approach grounds complex mathematical concepts in the body's natural sensorimotor capabilities.
Technical Achievement
Building upon the proven foundation of the Tactile Memory Recall system, this ongoing project:
Extends validated tactile architecture from 3-finger tracking to 64-pin spatial arrays
Implements real-time entropy calculation with mathematical precision for information field visualization
Integrates 4D stereographic projection algorithms mapping higher-dimensional spaces to physical pin heights
Achieves temporal decay modeling where entropy increase becomes tangible through progressive pin movement
EXECUTIVE SUMMARY
Project Vision
The 4D Entropy Pin Camera investigates how tactile pin arrays combined can create tangible representations of 4D space, entropy decay, and related mathematical concepts through embodied interaction.
Key Innovation
Instead of traditional visual scientific visualization, this system creates tactile interfaces where mathematical abstractions—entropy fields and 4D stereographic projections—are encoded through dynamic physical pin movements and retrieved through direct haptic exploration. This approach grounds complex mathematical concepts in the body's natural sensorimotor capabilities.
Technical Achievement
Building upon the proven foundation of the Tactile Memory Recall system, this ongoing project:
Extends validated tactile architecture from 3-finger tracking to 64-pin spatial arrays
Implements real-time entropy calculation with mathematical precision for information field visualization
Integrates 4D stereographic projection algorithms mapping higher-dimensional spaces to physical pin heights
Achieves temporal decay modeling where entropy increase becomes tangible through progressive pin movement
EXECUTIVE SUMMARY
Project Vision
The 4D Entropy Pin Camera investigates how tactile pin arrays combined with temporal visualization can create tangible representations of abstract mathematical phenomena, enabling users to physically experience entropy decay, dimensional projections, and gravitational influences through embodied interaction.
Key Innovation
Instead of traditional visual scientific visualization, this system creates temporal tactile interfaces where mathematical abstractions—entropy fields, 4D stereographic projections, and gravitational biases—are encoded through dynamic physical pin movements and retrieved through direct haptic exploration. This approach grounds complex mathematical concepts in the body's natural sensorimotor capabilities.
Technical Achievement
Building upon the proven foundation of the Tactile Memory Recall system, this ongoing project:
Extends validated tactile architecture from 3-finger tracking to 64-pin spatial arrays
Implements real-time entropy calculation with mathematical precision for information field visualization
Integrates 4D stereographic projection algorithms mapping higher-dimensional spaces to physical pin heights
Incorporates gravitational reference frames through IMU sensor fusion for physically-grounded spatial relationships
Achieves temporal decay modeling where entropy increase becomes tangible through progressive pin movement
PROJECT OVERVIEW
The Challenge
Current scientific visualization technologies predominantly rely on visual abstraction, creating barriers for kinesthetic learners, visually impaired researchers, and students struggling with abstract mathematical concepts. This represents a significant gap in educational accessibility.
Solution
The 4D Entropy Pin Camera creates a tactile interface that:
Captures visual scenes through computer vision with depth estimation and motion analysis
Calculates entropy fields using information theory principles for each spatial region
Projects 4D mathematical spaces onto 3D pin array surfaces through stereographic mapping
Integrates gravitational orientation from IMU sensors for physically-intuitive spatial reference
Visualizes temporal decay where entropy increase becomes tangible through progressive pin lowering
PROJECT OVERVIEW
The Challenge
Current scientific visualization technologies predominantly rely on visual abstraction, creating barriers for kinesthetic learners, visually impaired researchers, and students struggling with abstract mathematical concepts. This represents a significant gap in educational accessibility.
Solution
The 4D Entropy Pin Camera creates a tactile interface that:
Captures visual scenes through computer vision with depth estimation and motion analysis
Calculates entropy fields using information theory principles for each spatial region
Projects 4D mathematical spaces onto 3D pin array surfaces through stereographic mapping
Integrates gravitational orientation from IMU sensors for physically-intuitive spatial reference
Visualizes temporal decay where entropy increase becomes tangible through progressive pin lowering
PROJECT OVERVIEW
The Challenge
Current scientific visualization technologies predominantly rely on visual abstraction, creating barriers for kinesthetic learners, visually impaired researchers, and students struggling with abstract mathematical concepts. This represents a significant gap in educational accessibility.
Solution
The 4D Entropy Pin Camera creates a tactile interface that:
Captures visual scenes through computer vision with depth estimation and motion analysis
Calculates entropy fields using information theory principles for each spatial region
Projects 4D mathematical spaces onto 3D pin array surfaces through stereographic mapping
Integrates gravitational orientation from IMU sensors for physically-intuitive spatial reference
Visualizes temporal decay where entropy increase becomes tangible through progressive pin lowering
PROJECT OVERVIEW
The Challenge
Current memory augmentation technologies predominantly target visual and auditory modalities, despite mounting evidence that physical interactions fundamentally shape mental representations and recall performance. This oversight represents a significant gap in our approach to cognitive enhancement, particularly given that spatial memory formation naturally integrates proprioceptive information during environmental exploration.
Solution
Tactile Memory Replay creates a wearable interface that:
Records spatial poses through multi-sensor finger orientation tracking
Stores memory anchors as persistent proprioceptive patterns
Triggers haptic feedback when users approximate recorded configurations
Enables embodied recall without relying on visual or auditory cues
Core Functionality
MAP Mode - Spatial Memory Encoding
User positions fingers → Apply force → System records pose → Memory stored
↓ ↓ ↓ ↓
Natural exploration Contact detection 3D tracking EEPROM persistence
When a user applies pressure above the force threshold (150 units), the system begins recording finger orientations from three IMU sensors over a 3-second window, averaging the readings to create a stable spatial memory.
REPLAY Mode - Embodied Retrieval
Finger movement → Pose comparison → Distance calculation → Haptic activation
↓ ↓ ↓ ↓
Real-time IMU Pattern matching Euclidean distance Motor feedback
The system continuously compares current finger poses against stored memories using 3D Euclidean distance. When the distance falls below 300° tolerance, maximum intensity haptic feedback activates across all three motors.
RESEARCH CONTEXT & MOTIVATION
Theoretical Framework
This research builds on the foundational premise that embodied cognition enables deeper understanding of abstract concepts through physical interaction (Lakoff & Johnson, 1999). Key principles include:
Embodied Mathematics: Mathematical concepts become more intuitive when grounded in physical experience and sensorimotor interaction
Temporal Cognition: Understanding of time-dependent processes improves when change becomes tangible rather than purely visual
Accessibility Through Touch: Haptic interfaces can democratize complex scientific concepts for diverse learning styles and abilities
Scientific Visualization Research
Decades of research demonstrate that multimodal representation enhances understanding of complex phenomena:
Tangible Interfaces (Ishii & Ullmer, 1997): Physical manipulation of digital information creates more intuitive and memorable interactions than screen-based abstractions
Haptic Learning (Minogue & Jones, 2006): Tactile exploration significantly improves spatial reasoning and mathematical concept formation
Research Gap Analysis
Current Limitations
Visual Dependency: Scientific visualization predominantly targets visual channels, excluding users with visual impairments
Abstract Interfaces: Mathematical concepts remain disconnected from physical intuition and embodied understanding
Static Representation: Temporal processes like entropy increase lack tangible, manipulable representation methods
Accessibility Barriers: Advanced mathematics education relies heavily on visual-spatial skills, creating systematic exclusion
Contribution
The 4D Entropy Pin Camera addresses these gaps by:
Leveraging tactile modalities for mathematical concept exploration and scientific data analysis
Grounding abstract mathematics in physical pin movements and spatial relationships
Visualizing temporal processes through progressive tactile change and entropy decay
Potential Applications
Scientific Education
Interactive physics demonstrations where students can feel entropy increase, gravitational effects, and dimensional relationships
Mathematics education tools for topology, differential geometry, and information theory concepts
Accessibility Technology
Scientific visualization tools for visually impaired researchers in physics and mathematics
Inclusive classroom technologies that support diverse learning styles and abilities
Artistic Expression
New medium for temporal tactile art where entropy decay becomes sculptural material
Interactive installations exploring the relationship between information, time, and physical form
Creative coding platforms for artists working with mathematical and scientific concepts
RESEARCH CONTEXT & MOTIVATION
Theoretical Framework
This research builds on the foundational premise that embodied cognition enables deeper understanding of abstract concepts through physical interaction (Lakoff & Johnson, 1999). Key principles include:
Embodied Mathematics: Mathematical concepts become more intuitive when grounded in physical experience and sensorimotor interaction
Temporal Cognition: Understanding of time-dependent processes improves when change becomes tangible rather than purely visual
Accessibility Through Touch: Haptic interfaces can democratize complex scientific concepts for diverse learning styles and abilities
Scientific Visualization Research
Decades of research demonstrate that multimodal representation enhances understanding of complex phenomena:
Tangible Interfaces (Ishii & Ullmer, 1997): Physical manipulation of digital information creates more intuitive and memorable interactions than screen-based abstractions
Haptic Learning (Minogue & Jones, 2006): Tactile exploration significantly improves spatial reasoning and mathematical concept formation
Research Gap Analysis
Current Limitations
Visual Dependency: Scientific visualization predominantly targets visual channels, excluding users with visual impairments
Abstract Interfaces: Mathematical concepts remain disconnected from physical intuition and embodied understanding
Static Representation: Temporal processes like entropy increase lack tangible, manipulable representation methods
Accessibility Barriers: Advanced mathematics education relies heavily on visual-spatial skills, creating systematic exclusion
Contribution
The 4D Entropy Pin Camera addresses these gaps by:
Leveraging tactile modalities for mathematical concept exploration and scientific data analysis
Grounding abstract mathematics in physical pin movements and spatial relationships
Visualizing temporal processes through progressive tactile change and entropy decay
Potential Applications
Scientific Education
Interactive physics demonstrations where students can feel entropy increase, gravitational effects, and dimensional relationships
Mathematics education tools for topology, differential geometry, and information theory concepts
Accessibility Technology
Scientific visualization tools for visually impaired researchers in physics and mathematics
Inclusive classroom technologies that support diverse learning styles and abilities
Artistic Expression
New medium for temporal tactile art where entropy decay becomes sculptural material
Interactive installations exploring the relationship between information, time, and physical form
Creative coding platforms for artists working with mathematical and scientific concepts
RESEARCH CONTEXT & MOTIVATION
Theoretical Framework
This research builds on the foundational premise that embodied cognition enables deeper understanding of abstract concepts through physical interaction (Lakoff & Johnson, 1999). Key principles include:
Embodied Mathematics: Mathematical concepts become more intuitive when grounded in physical experience and sensorimotor interaction
Temporal Cognition: Understanding of time-dependent processes improves when change becomes tangible rather than purely visual
Accessibility Through Touch: Haptic interfaces can democratize complex scientific concepts for diverse learning styles and abilities
Scientific Visualization Research
Decades of research demonstrate that multimodal representation enhances understanding of complex phenomena:
Tangible Interfaces (Ishii & Ullmer, 1997): Physical manipulation of digital information creates more intuitive and memorable interactions than screen-based abstractions
Haptic Learning (Minogue & Jones, 2006): Tactile exploration significantly improves spatial reasoning and mathematical concept formation
Research Gap Analysis
Current Limitations
Visual Dependency: Scientific visualization predominantly targets visual channels, excluding users with visual impairments
Abstract Interfaces: Mathematical concepts remain disconnected from physical intuition and embodied understanding
Static Representation: Temporal processes like entropy increase lack tangible, manipulable representation methods
Accessibility Barriers: Advanced mathematics education relies heavily on visual-spatial skills, creating systematic exclusion
Contribution
The 4D Entropy Pin Camera addresses these gaps by:
Leveraging tactile modalities for mathematical concept exploration and scientific data analysis
Grounding abstract mathematics in physical pin movements and spatial relationships
Visualizing temporal processes through progressive tactile change and entropy decay
Potential Applications
Scientific Education
Interactive physics demonstrations where students can feel entropy increase, gravitational effects, and dimensional relationships
Mathematics education tools for topology, differential geometry, and information theory concepts
Accessibility Technology
Scientific visualization tools for visually impaired researchers in physics and mathematics
Inclusive classroom technologies that support diverse learning styles and abilities
Artistic Expression
New medium for temporal tactile art where entropy decay becomes sculptural material
Interactive installations exploring the relationship between information, time, and physical form
Creative coding platforms for artists working with mathematical and scientific concepts
TECHNICAL INNOVATION
System Architecture
Hardware Design Evolution
Building upon the validated Tactile Memory Recall system architecture, the 4D camera scales from finger tracking to spatial array visualization:
┌─────────────────────────────────────────────────────────────┐
│ 4D ENTROPY PIN CAMERA │
├─────────────────────────────────────────────────────────────┤
│ CAPTURE LAYER │
│ ├── Raspberry Pi Camera Module (12MP, depth estimation) │
│ ├── IMU Sensor Array (MPU6050, gravitational reference) │
│ ├── Real-time Processing (OpenCV, computer vision) │
│ └── Mathematical Framework (entropy, 4D projection) │
├─────────────────────────────────────────────────────────────┤
│ PROCESSING LAYER │
│ ├── Raspberry Pi 4 (Primary computation) │
│ │ ├── Entropy Field Calculation │
│ │ ├── 4D Stereographic Projection │
│ │ ├── Temporal Decay Modeling │
│ │ └── Gravitational Bias Integration │
│ ├── Arduino Mega 2560 (Pin array control) │
│ │ ├── 64-channel servo coordination │
│ │ ├── Real-time position updates (<50ms) │
│ │ └── Smooth motion interpolation │
│ └── Communication Interface (Serial, I2C) │
├─────────────────────────────────────────────────────────────┤
│ OUTPUT LAYER │
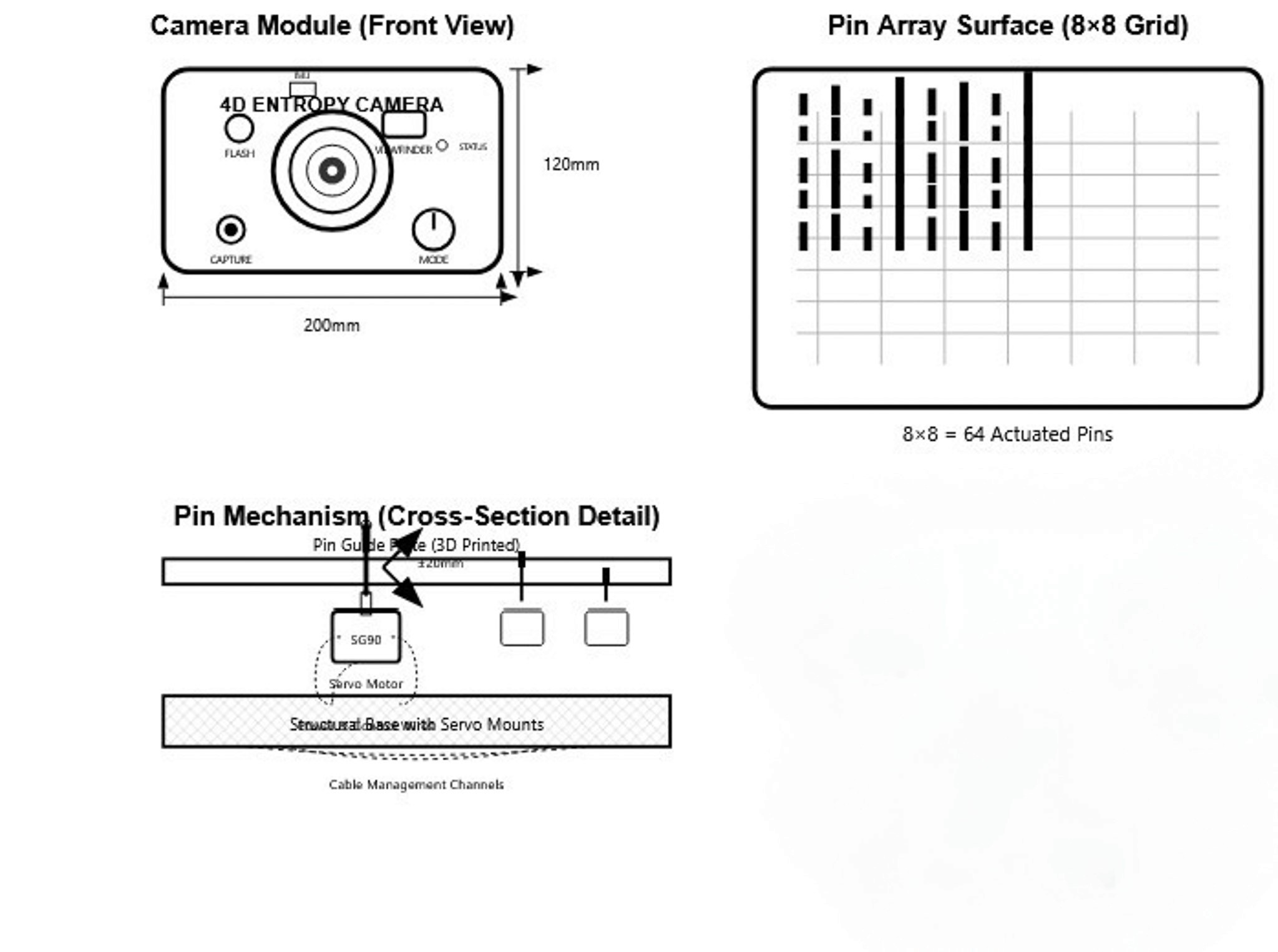
│ ├── Pin Array Surface (8×8 = 64 actuated pins) │
│ │ ├── SG90 Servo Motors (180° range) │
│ │ ├── Stainless Steel Pins (2mm diameter) │
│ │ ├── Linear Motion (0-40mm travel) │
│ │ └── Precision Guide Plate (±0.5mm accuracy) │
│ ├── Power Management (5V@10A distribution) │
│ └── User Interface (Command processing, status display) │
└─────────────────────────────────────────────────────────────┘
Component Selection Rationale
Raspberry Pi 4 (8GB): Provides sufficient computational power for real-time computer vision processing, mathematical calculations, and system coordination while maintaining cost-effectiveness.
Arduino Mega 2560: Proven platform from Tactile Memory system with adequate I/O pins for 64-servo coordination and established software library support.
64× SG90 Servo Motors: Cost-effective actuators providing 180° rotation range with adequate torque for pin movement, selected for availability and Arduino compatibility.
PCA9685 PWM Drivers (4×): Enable precise servo control with I2C communication, supporting simultaneous operation of 64 servos with minimal latency.
MPU6050 IMU Sensor: Validated component from previous system providing 6-DOF sensing for gravitational reference frame establishment.
Software Architecture
Core Mathematical Framework
The system implements advanced algorithms for transforming visual data into tactile mathematical representations:
Entropy Field Calculation:
def calculate_entropy_field(image_regions):
entropy_map = np.zeros((8, 8))
for i, j in enumerate(regions):
hist, _ = np.histogram(region, bins=256, range=(0, 256))
prob = hist / hist.sum() + 1e-10 # Avoid log(0)
entropy = -np.sum(prob * np.log2(prob))
entropy_map[i, j] = entropy
return entropy_map
4D Stereographic Projection:
def project_4d_to_pins(depth, entropy, gravity_orientation):
# Map 4D coordinates (x,y,z,w) to 3D pin heights
w_coordinate = (i + j) / (rows + cols) # 4th dimension
shadow_factor = math.cos(w_coordinate * math.pi) * 0.5 + 0.5
entropy_factor = 1.0 - (entropy[i,j] / 8.0) # Normalize
gravity_bias = math.sin(gravity_roll) * spatial_offset
pin_height = depth * entropy_factor * shadow_factor + gravity_bias
return constrain(pin_height, 0.0, 1.0)
Temporal Decay Implementation:
def apply_entropy_decay(pin_heights, history, decay_rate=0.95):
# Model thermodynamic entropy increase over time
for i, past_state in enumerate(history):
time_factor = decay_rate ** (len(history) - i)
pin_heights = np.maximum(pin_heights, past_state * time_factor)
return pin_heights
Design Decisions & Trade-offs
8×8 Pin Resolution The system balances tactile resolution with cost-effectiveness and technical complexity. 64 pins provide sufficient spatial detail for mathematical concept exploration while maintaining manageable hardware requirements.
Real-time Processing Priority Mathematical accuracy is balanced against response time, with algorithms optimized to maintain <50ms latency for fluid tactile interaction, matching proven performance from the Tactile Memory system.
Physical Pin Material Stainless steel pins provide durability and smooth tactile experience while maintaining structural integrity under repeated manipulation.
Modular Architecture System design enables incremental scaling to higher resolutions (16×16, 32×32) while maintaining software compatibility and upgrade pathways.
Circuit Architecture
Pin Array Control System:
Raspberry Pi 4 ←→ Arduino Mega 2560 ←→ 4× PCA9685 ←→ 64× SG90 Servos
↓ ↓ ↓ ↓
Image Processing Pin Coordination PWM Generation Physical Motion
Entropy Calculation Servo Timing Signal Control Tactile Output
4D Projection Communication Power Management User Interface
Power Distribution
5V @ 10A Supply: Dedicated servo power with current limiting and protection
USB-C Input: Raspberry Pi power with independent regulation
Voltage Monitoring: Automatic shutdown protection for system safety
Communication Protocols
Serial Interface: Raspberry Pi ↔ Arduino (9600 baud, command protocol)
I2C Bus: Arduino ↔ PCA9685 drivers (100kHz, address multiplexing)
PWM Control: PCA9685 ↔ Servos (50Hz update rate, 12-bit resolution)
3D Printed Components
Main Housing Assembly
Dimensions: 300mm × 200mm × 80mm overall system envelope
Material: PLA plastic with 20% infill for structural components
Features: Integrated cable management, component mounting posts, ventilation
Pin Guide Plate
Precision: 64 holes at 2.2mm diameter with ±0.1mm tolerance
Spacing: 25mm center-to-center grid for optimal tactile resolution
Surface: Smooth bore finish for frictionless pin movement
Camera Housing
Protection: Enclosed module with lens access and mounting provisions
Integration: Raspberry Pi mounting with GPIO access and thermal management
Software Implementation
System State Management
enum SystemState {
IDLE, // Waiting for user commands
CAPTURE, // Recording visual scene with entropy analysis
PROCESS, // Computing 4D projection and pin mapping
DISPLAY, // Outputting tactile representation
DECAY, // Modeling temporal entropy evolution
CALIBRATE // System testing and sensor monitoring
};
Command Interface
CAPTURE: Initiate visual scene analysis and entropy calculation
EXPLORE: Enter tactile interaction mode with temporal decay
CALIBRATE: Real-time sensor monitoring and pin array testing
RESET: Return all pins to neutral position and clear memory
STATUS: Display system information and current operational parameters
Performance Metrics
Image Processing: 1080p @ 30fps with real-time depth estimation
Mathematical Computation: Entropy field calculation <20ms
Pin Array Response: Full 64-pin update in <50ms
System Latency: End-to-end capture-to-tactile response <100ms
Positional Accuracy: ±0.5mm pin placement precision
TECHNICAL INNOVATION
System Architecture
Hardware Design Evolution
Building upon the validated Tactile Memory Recall system architecture, the 4D camera scales from finger tracking to spatial array visualization:
┌─────────────────────────────────────────────────────────────┐
│ 4D ENTROPY PIN CAMERA │
├─────────────────────────────────────────────────────────────┤
│ CAPTURE LAYER │
│ ├── Raspberry Pi Camera Module (12MP, depth estimation) │
│ ├── IMU Sensor Array (MPU6050, gravitational reference) │
│ ├── Real-time Processing (OpenCV, computer vision) │
│ └── Mathematical Framework (entropy, 4D projection) │
├─────────────────────────────────────────────────────────────┤
│ PROCESSING LAYER │
│ ├── Raspberry Pi 4 (Primary computation) │
│ │ ├── Entropy Field Calculation │
│ │ ├── 4D Stereographic Projection │
│ │ ├── Temporal Decay Modeling │
│ │ └── Gravitational Bias Integration │
│ ├── Arduino Mega 2560 (Pin array control) │
│ │ ├── 64-channel servo coordination │
│ │ ├── Real-time position updates (<50ms) │
│ │ └── Smooth motion interpolation │
│ └── Communication Interface (Serial, I2C) │
├─────────────────────────────────────────────────────────────┤
│ OUTPUT LAYER │
│ ├── Pin Array Surface (8×8 = 64 actuated pins) │
│ │ ├── SG90 Servo Motors (180° range) │
│ │ ├── Stainless Steel Pins (2mm diameter) │
│ │ ├── Linear Motion (0-40mm travel) │
│ │ └── Precision Guide Plate (±0.5mm accuracy) │
│ ├── Power Management (5V@10A distribution) │
│ └── User Interface (Command processing, status display) │
└─────────────────────────────────────────────────────────────┘
Component Selection Rationale
Raspberry Pi 4 (8GB): Provides sufficient computational power for real-time computer vision processing, mathematical calculations, and system coordination while maintaining cost-effectiveness.
Arduino Mega 2560: Proven platform from Tactile Memory system with adequate I/O pins for 64-servo coordination and established software library support.
64× SG90 Servo Motors: Cost-effective actuators providing 180° rotation range with adequate torque for pin movement, selected for availability and Arduino compatibility.
PCA9685 PWM Drivers (4×): Enable precise servo control with I2C communication, supporting simultaneous operation of 64 servos with minimal latency.
MPU6050 IMU Sensor: Validated component from previous system providing 6-DOF sensing for gravitational reference frame establishment.
Software Architecture
Core Mathematical Framework
The system implements advanced algorithms for transforming visual data into tactile mathematical representations:
Entropy Field Calculation:
def calculate_entropy_field(image_regions):
entropy_map = np.zeros((8, 8))
for i, j in enumerate(regions):
hist, _ = np.histogram(region, bins=256, range=(0, 256))
prob = hist / hist.sum() + 1e-10 # Avoid log(0)
entropy = -np.sum(prob * np.log2(prob))
entropy_map[i, j] = entropy
return entropy_map
4D Stereographic Projection:
def project_4d_to_pins(depth, entropy, gravity_orientation):
# Map 4D coordinates (x,y,z,w) to 3D pin heights
w_coordinate = (i + j) / (rows + cols) # 4th dimension
shadow_factor = math.cos(w_coordinate * math.pi) * 0.5 + 0.5
entropy_factor = 1.0 - (entropy[i,j] / 8.0) # Normalize
gravity_bias = math.sin(gravity_roll) * spatial_offset
pin_height = depth * entropy_factor * shadow_factor + gravity_bias
return constrain(pin_height, 0.0, 1.0)
Temporal Decay Implementation:
def apply_entropy_decay(pin_heights, history, decay_rate=0.95):
# Model thermodynamic entropy increase over time
for i, past_state in enumerate(history):
time_factor = decay_rate ** (len(history) - i)
pin_heights = np.maximum(pin_heights, past_state * time_factor)
return pin_heights
Design Decisions & Trade-offs
8×8 Pin Resolution The system balances tactile resolution with cost-effectiveness and technical complexity. 64 pins provide sufficient spatial detail for mathematical concept exploration while maintaining manageable hardware requirements.
Real-time Processing Priority Mathematical accuracy is balanced against response time, with algorithms optimized to maintain <50ms latency for fluid tactile interaction, matching proven performance from the Tactile Memory system.
Physical Pin Material Stainless steel pins provide durability and smooth tactile experience while maintaining structural integrity under repeated manipulation.
Modular Architecture System design enables incremental scaling to higher resolutions (16×16, 32×32) while maintaining software compatibility and upgrade pathways.
Circuit Architecture
Pin Array Control System:
Raspberry Pi 4 ←→ Arduino Mega 2560 ←→ 4× PCA9685 ←→ 64× SG90 Servos
↓ ↓ ↓ ↓
Image Processing Pin Coordination PWM Generation Physical Motion
Entropy Calculation Servo Timing Signal Control Tactile Output
4D Projection Communication Power Management User Interface
Power Distribution
5V @ 10A Supply: Dedicated servo power with current limiting and protection
USB-C Input: Raspberry Pi power with independent regulation
Voltage Monitoring: Automatic shutdown protection for system safety
Communication Protocols
Serial Interface: Raspberry Pi ↔ Arduino (9600 baud, command protocol)
I2C Bus: Arduino ↔ PCA9685 drivers (100kHz, address multiplexing)
PWM Control: PCA9685 ↔ Servos (50Hz update rate, 12-bit resolution)
3D Printed Components
Main Housing Assembly
Dimensions: 300mm × 200mm × 80mm overall system envelope
Material: PLA plastic with 20% infill for structural components
Features: Integrated cable management, component mounting posts, ventilation
Pin Guide Plate
Precision: 64 holes at 2.2mm diameter with ±0.1mm tolerance
Spacing: 25mm center-to-center grid for optimal tactile resolution
Surface: Smooth bore finish for frictionless pin movement
Camera Housing
Protection: Enclosed module with lens access and mounting provisions
Integration: Raspberry Pi mounting with GPIO access and thermal management
Software Implementation
System State Management
enum SystemState {
IDLE, // Waiting for user commands
CAPTURE, // Recording visual scene with entropy analysis
PROCESS, // Computing 4D projection and pin mapping
DISPLAY, // Outputting tactile representation
DECAY, // Modeling temporal entropy evolution
CALIBRATE // System testing and sensor monitoring
};
Command Interface
CAPTURE: Initiate visual scene analysis and entropy calculation
EXPLORE: Enter tactile interaction mode with temporal decay
CALIBRATE: Real-time sensor monitoring and pin array testing
RESET: Return all pins to neutral position and clear memory
STATUS: Display system information and current operational parameters
Performance Metrics
Image Processing: 1080p @ 30fps with real-time depth estimation
Mathematical Computation: Entropy field calculation <20ms
Pin Array Response: Full 64-pin update in <50ms
System Latency: End-to-end capture-to-tactile response <100ms
Positional Accuracy: ±0.5mm pin placement precision
TECHNICAL INNOVATION
System Architecture
Hardware Design Evolution
Building upon the validated Tactile Memory Recall system architecture, the 4D camera scales from finger tracking to spatial array visualization:
┌─────────────────────────────────────────────────────────────┐
│ 4D ENTROPY PIN CAMERA │
├─────────────────────────────────────────────────────────────┤
│ CAPTURE LAYER │
│ ├── Raspberry Pi Camera Module (12MP, depth estimation) │
│ ├── IMU Sensor Array (MPU6050, gravitational reference) │
│ ├── Real-time Processing (OpenCV, computer vision) │
│ └── Mathematical Framework (entropy, 4D projection) │
├─────────────────────────────────────────────────────────────┤
│ PROCESSING LAYER │
│ ├── Raspberry Pi 4 (Primary computation) │
│ │ ├── Entropy Field Calculation │
│ │ ├── 4D Stereographic Projection │
│ │ ├── Temporal Decay Modeling │
│ │ └── Gravitational Bias Integration │
│ ├── Arduino Mega 2560 (Pin array control) │
│ │ ├── 64-channel servo coordination │
│ │ ├── Real-time position updates (<50ms) │
│ │ └── Smooth motion interpolation │
│ └── Communication Interface (Serial, I2C) │
├─────────────────────────────────────────────────────────────┤
│ OUTPUT LAYER │
│ ├── Pin Array Surface (8×8 = 64 actuated pins) │
│ │ ├── SG90 Servo Motors (180° range) │
│ │ ├── Stainless Steel Pins (2mm diameter) │
│ │ ├── Linear Motion (0-40mm travel) │
│ │ └── Precision Guide Plate (±0.5mm accuracy) │
│ ├── Power Management (5V@10A distribution) │
│ └── User Interface (Command processing, status display) │
└─────────────────────────────────────────────────────────────┘
Component Selection Rationale
Raspberry Pi 4 (8GB): Provides sufficient computational power for real-time computer vision processing, mathematical calculations, and system coordination while maintaining cost-effectiveness.
Arduino Mega 2560: Proven platform from Tactile Memory system with adequate I/O pins for 64-servo coordination and established software library support.
64× SG90 Servo Motors: Cost-effective actuators providing 180° rotation range with adequate torque for pin movement, selected for availability and Arduino compatibility.
PCA9685 PWM Drivers (4×): Enable precise servo control with I2C communication, supporting simultaneous operation of 64 servos with minimal latency.
MPU6050 IMU Sensor: Validated component from previous system providing 6-DOF sensing for gravitational reference frame establishment.
Software Architecture
Core Mathematical Framework
The system implements advanced algorithms for transforming visual data into tactile mathematical representations:
Entropy Field Calculation:
def calculate_entropy_field(image_regions):
entropy_map = np.zeros((8, 8))
for i, j in enumerate(regions):
hist, _ = np.histogram(region, bins=256, range=(0, 256))
prob = hist / hist.sum() + 1e-10 # Avoid log(0)
entropy = -np.sum(prob * np.log2(prob))
entropy_map[i, j] = entropy
return entropy_map
4D Stereographic Projection:
def project_4d_to_pins(depth, entropy, gravity_orientation):
# Map 4D coordinates (x,y,z,w) to 3D pin heights
w_coordinate = (i + j) / (rows + cols) # 4th dimension
shadow_factor = math.cos(w_coordinate * math.pi) * 0.5 + 0.5
entropy_factor = 1.0 - (entropy[i,j] / 8.0) # Normalize
gravity_bias = math.sin(gravity_roll) * spatial_offset
pin_height = depth * entropy_factor * shadow_factor + gravity_bias
return constrain(pin_height, 0.0, 1.0)
Temporal Decay Implementation:
def apply_entropy_decay(pin_heights, history, decay_rate=0.95):
# Model thermodynamic entropy increase over time
for i, past_state in enumerate(history):
time_factor = decay_rate ** (len(history) - i)
pin_heights = np.maximum(pin_heights, past_state * time_factor)
return pin_heights
Design Decisions & Trade-offs
8×8 Pin Resolution The system balances tactile resolution with cost-effectiveness and technical complexity. 64 pins provide sufficient spatial detail for mathematical concept exploration while maintaining manageable hardware requirements.
Real-time Processing Priority Mathematical accuracy is balanced against response time, with algorithms optimized to maintain <50ms latency for fluid tactile interaction, matching proven performance from the Tactile Memory system.
Physical Pin Material Stainless steel pins provide durability and smooth tactile experience while maintaining structural integrity under repeated manipulation.
Modular Architecture System design enables incremental scaling to higher resolutions (16×16, 32×32) while maintaining software compatibility and upgrade pathways.
Circuit Architecture
Pin Array Control System:
Raspberry Pi 4 ←→ Arduino Mega 2560 ←→ 4× PCA9685 ←→ 64× SG90 Servos
↓ ↓ ↓ ↓
Image Processing Pin Coordination PWM Generation Physical Motion
Entropy Calculation Servo Timing Signal Control Tactile Output
4D Projection Communication Power Management User Interface
Power Distribution
5V @ 10A Supply: Dedicated servo power with current limiting and protection
USB-C Input: Raspberry Pi power with independent regulation
Voltage Monitoring: Automatic shutdown protection for system safety
Communication Protocols
Serial Interface: Raspberry Pi ↔ Arduino (9600 baud, command protocol)
I2C Bus: Arduino ↔ PCA9685 drivers (100kHz, address multiplexing)
PWM Control: PCA9685 ↔ Servos (50Hz update rate, 12-bit resolution)
3D Printed Components
Main Housing Assembly
Dimensions: 300mm × 200mm × 80mm overall system envelope
Material: PLA plastic with 20% infill for structural components
Features: Integrated cable management, component mounting posts, ventilation
Pin Guide Plate
Precision: 64 holes at 2.2mm diameter with ±0.1mm tolerance
Spacing: 25mm center-to-center grid for optimal tactile resolution
Surface: Smooth bore finish for frictionless pin movement
Camera Housing
Protection: Enclosed module with lens access and mounting provisions
Integration: Raspberry Pi mounting with GPIO access and thermal management
Software Implementation
System State Management
enum SystemState {
IDLE, // Waiting for user commands
CAPTURE, // Recording visual scene with entropy analysis
PROCESS, // Computing 4D projection and pin mapping
DISPLAY, // Outputting tactile representation
DECAY, // Modeling temporal entropy evolution
CALIBRATE // System testing and sensor monitoring
};
Command Interface
CAPTURE: Initiate visual scene analysis and entropy calculation
EXPLORE: Enter tactile interaction mode with temporal decay
CALIBRATE: Real-time sensor monitoring and pin array testing
RESET: Return all pins to neutral position and clear memory
STATUS: Display system information and current operational parameters
Performance Metrics
Image Processing: 1080p @ 30fps with real-time depth estimation
Mathematical Computation: Entropy field calculation <20ms
Pin Array Response: Full 64-pin update in <50ms
System Latency: End-to-end capture-to-tactile response <100ms
Positional Accuracy: ±0.5mm pin placement precision
RESEARCH VISION
Immediate Research Opportunities
Empirical Validation Studies
The functional prototype enables systematic investigation of fundamental questions about embodied mathematical understanding:
Mathematical Learning Enhancement: How does tactile exploration of 4D projections affect understanding of higher-dimensional mathematical concepts compared to traditional visual methods? Controlled studies can compare learning outcomes across visual, tactile, and multimodal instruction approaches.
Temporal Perception Research: Can users develop intuitive understanding of entropy increase through repeated tactile exposure to decay patterns? Longitudinal studies can measure conceptual development and retention of thermodynamic principles.
Accessibility Impact Assessment: How effectively can tactile 4D visualization democratize advanced mathematical concepts for visually impaired learners? Collaborative research with accessibility organizations can validate real-world educational applications.
Technical Evolution Pathway:
Hardware Advancement
Resolution Scaling: Progressive development from 8×8 (64 pins) to 16×16 (256 pins) to 32×32 (1,024 pins) for research-grade spatial resolution and detailed mathematical visualization.
Advanced Actuators: Investigation of alternative actuation methods including pneumatic systems, shape-memory alloys, and ultrasonic haptic displays for enhanced tactile fidelity.
Wireless Integration: Development of distributed sensor networks enabling larger-scale installations and collaborative exploration environments.
Material Innovation: Research into novel tactile materials, temperature-responsive surfaces, and programmable matter for richer sensory experiences.
Software Innovation
Machine Learning Integration: Adaptive algorithms personalizing mathematical representation for individual learning styles and conceptual development patterns.
Advanced Mathematics: Extension beyond entropy and 4D projection to include complex analysis, differential geometry, and quantum mechanical visualization.
Cross-Platform Integration: Compatibility with existing mathematical software (MATLAB, Mathematica, Python scientific stack) for seamless workflow integration.
RESEARCH VISION
Immediate Research Opportunities
Empirical Validation Studies
The functional prototype enables systematic investigation of fundamental questions about embodied spatial memory:
Memory Formation Comparison: How does haptic encoding affect spatial memory formation compared to traditional visual methods? The system could support controlled studies comparing recall accuracy and retention across different encoding modalities.
Parameter Optimization: What haptic feedback parameters (intensity, duration, spatial patterns) maximize memory effectiveness? The adjustable system parameters enable systematic optimization studies.
Application Development
Assistive Technology: Collaboration with organizations serving visually impaired populations to develop and validate navigation aids for real-world environments.
Therapeutic Applications: Investigation of the system's potential for cognitive rehabilitation following brain injury or age-related spatial memory decline.
Technical Evolution Pathway
Hardware Advancement
Wireless Integration: Developing ESP32-based sensor nodes for seamless wearable integration without tethered connections to base station.
Miniaturization: Exploring ring-form factor sensors and flexible electronics for improved wearability and social acceptability.
Enhanced Haptics: Investigating directional tactile feedback, temperature modulation, and ultrasonic haptic displays for richer spatial information encoding.
Software Innovation
Machine Learning Integration: Adaptive algorithms that personalize pose matching thresholds and optimize haptic feedback patterns for individual users.
Pattern Recognition Enhancement: Advanced gesture classification and pose prediction algorithms for more robust spatial memory detection.
Broader Research Integration
External Research Network
Accessibility Organizations: Community-based participatory research with target user populations.
Rehabilitation Centers: Clinical validation of therapeutic applications for cognitive rehabilitation.
RESEARCH VISION
Immediate Research Opportunities
Empirical Validation Studies
The functional prototype enables systematic investigation of fundamental questions about embodied mathematical understanding:
Mathematical Learning Enhancement: How does tactile exploration of 4D projections affect understanding of higher-dimensional mathematical concepts compared to traditional visual methods? Controlled studies can compare learning outcomes across visual, tactile, and multimodal instruction approaches.
Temporal Perception Research: Can users develop intuitive understanding of entropy increase through repeated tactile exposure to decay patterns? Longitudinal studies can measure conceptual development and retention of thermodynamic principles.
Accessibility Impact Assessment: How effectively can tactile 4D visualization democratize advanced mathematical concepts for visually impaired learners? Collaborative research with accessibility organizations can validate real-world educational applications.
Technical Evolution Pathway:
Hardware Advancement
Resolution Scaling: Progressive development from 8×8 (64 pins) to 16×16 (256 pins) to 32×32 (1,024 pins) for research-grade spatial resolution and detailed mathematical visualization.
Advanced Actuators: Investigation of alternative actuation methods including pneumatic systems, shape-memory alloys, and ultrasonic haptic displays for enhanced tactile fidelity.
Wireless Integration: Development of distributed sensor networks enabling larger-scale installations and collaborative exploration environments.
Material Innovation: Research into novel tactile materials, temperature-responsive surfaces, and programmable matter for richer sensory experiences.
Software Innovation
Machine Learning Integration: Adaptive algorithms personalizing mathematical representation for individual learning styles and conceptual development patterns.
Advanced Mathematics: Extension beyond entropy and 4D projection to include complex analysis, differential geometry, and quantum mechanical visualization.
Cross-Platform Integration: Compatibility with existing mathematical software (MATLAB, Mathematica, Python scientific stack) for seamless workflow integration.
Broader Research Integration:
Interdisciplinary Collaboration
Mathematics Education Research: Partnership with education researchers studying embodied cognition, spatial reasoning, and mathematical concept formation through tactile modalities.
Accessibility Studies: Collaboration with disability studies researchers investigating inclusive design principles and assistive technology development.
Physics Education: Partnership with physics educators developing novel approaches to teaching advanced concepts through haptic interaction.
Long-term Impact Vision:
Democratizing Mathematical Understanding
The 4D Entropy Pin Camera represents a fundamental shift toward inclusive mathematical education where abstract concepts become physically accessible regardless of visual ability or learning style. This research contributes to a future where advanced mathematics and physics are no longer limited to those with specific sensory capabilities or cognitive approaches.
Advancing Embodied Cognition Research
By creating tangible representations of temporal mathematical processes, this work pushes the boundaries of embodied cognition theory and provides new methodologies for studying how physical interaction shapes conceptual understanding.
Transforming Scientific Visualization
The project establishes tactile scientific visualization as a legitimate and powerful alternative to traditional visual approaches, opening new research directions in data representation and human-computer interaction.